

合作客戶/
拜耳公司 |
同濟大學 |
聯合大學 |
美國保潔 |
美國強生 |
瑞士羅氏 |






相關新聞Info
推薦新聞Info
-
> 面向高效環保滅火劑的界面張力最小化:短鏈氟碳復配體系的設計與解析(三)
> 面向高效環保滅火劑的界面張力最小化:短鏈氟碳復配體系的設計與解析(二)
> 面向高效環保滅火劑的界面張力最小化:短鏈氟碳復配體系的設計與解析(一)
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(四)
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(三)
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(二)
> 基于連續表面張力模型微觀層面研究凝結顆粒動力學變化規律及能量耗散的影響(一)
> 基于表面張力、Walker沉降等研究3種表面活性劑對低階煤(LRC)潤濕作用的差異(三)
> 基于表面張力、Walker沉降等研究3種表面活性劑對低階煤(LRC)潤濕作用的差異(二)
> 基于表面張力、Walker沉降等研究3種表面活性劑對低階煤(LRC)潤濕作用的差異(一)
依靠表面張力及異丙醇運動的機器人水黽
來源:cnBeta 瀏覽 2087 次 發布時間:2021-11-08
你可能認為水黽昆蟲只是通過擺動它們的腿在水面上移動,但實際上它們利用的是所謂的馬拉戈尼效應。科學家們現在已經在一個微小的、無聲的水黽機器人中利用了這種現象。馬拉戈尼效應被定義為由于表面張力的梯度而沿著兩種液體之間的界面進行的質量轉移。
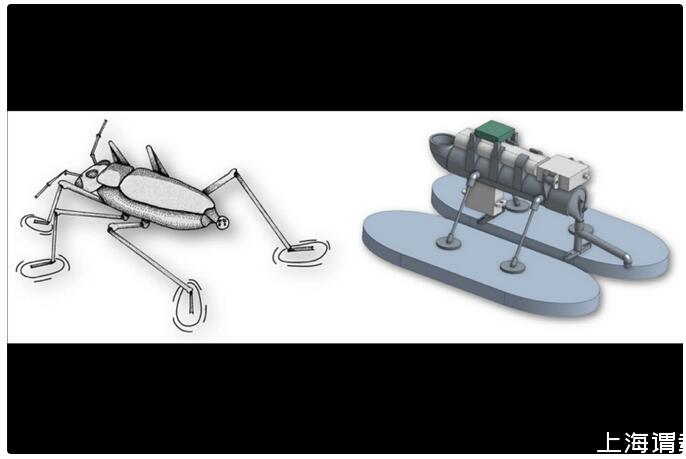
水黽通過分泌稱為脂質的不溶于水的化合物來利用它,以此來創造一種表面張力的不平衡,然后拉動它們前進。在Hassan Masoud助理教授的領導下,密歇根技術大學的一個團隊建造了一個小型機器人以同樣的方式工作。
該裝置被放置在了一組并排的浮橋上。不過,它沒有使用脂質來推進,而是通過控制異丙醇的釋放來創造表面張力的不平衡。
這些液體被裝在機器人的圓柱形身體里并從后面的水平旋轉噴嘴中噴出。通過遠程控制該噴嘴的方向,研究人員可以實時引導機器人。它的速度是通過改變酒精的流速來控制的。
在該機器人目前的化身中,它的最高速度約為每秒100毫米,每毫升異丙醇的燃料效率約為600毫米。科學家們正在努力改善這兩個數字,希望該技術有朝一日能在如野生動物觀察或難以進入的地點的環境監測等應用中找到用途,甚至有可能自主的機器人“群”可以共同完成此類任務。
最近在《Bioinspiration&Biomimetics》上發表的一篇論文中描述了這種機器人,在下面的視頻中則可以看到它的行動。